Als d-Regler bezeichne ich einen Regler ... , welcher ein Differential, resp die Ableitung der Veränderung des Fehlers berücksichtigt. Wenn der Fehler sich langsam verändert, wird der Wert entsprechend klein.
Der Kd-Parameter ist heikel einzu stellen
Der PID-Regler ist einfach die Summe, oft genügt ein einfacherer Reger
D-Regler steht für eine proportionale Verstärkung. Die Funktion: y(N) = Kp * e(N)
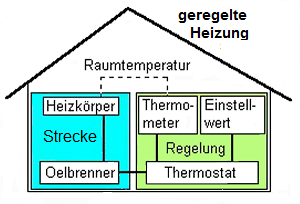
Im Beispiel: