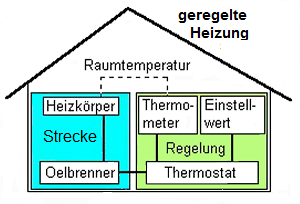
Als kybernetische Regler bezeichne ich das Glied des Regelkreises, in welchem die Kompensations-Massnahme aufgrund eines Signals mit der Ist-Soll-Differenz ausgeführt wird.
Beispiel:
Bei einer Heizung wird aufgrund des Signals vom Thermostaten die Heizleistung beispielsweise durch die Oelmengenzufuhr angepasst.
Jeder Regler repräsentiert eine Übertragungsfunktion. In vielen praktischen Fällen wird ein sogenannter PID-Regler verwendet, der 3 spezifische Funktionen vereint:
P-Regler steht für eine proportionale Verstärkung. Die Funktion: y(N) = Kp * e(N)
Im Beispiel:
Die Solltemperatur (einer Heizung) u = 20. Zum Zeitpunkt 0 ist x = 18, daraus folgt e = 2, was zu einer bestimmten Vergrösserung der Ventilöffnung in der Ölzufuhr führt.
D : Differenz (Ist - Soll)
R : PID-Regler : y(N) = Kp * e(N) + Ki * Summe (E(N) + Kd * delta e(N)
(proportional, integral, differential-Charakteristik
S : x(N)+T1 * dx(N)+T2 * dx hoch2 (N) = K0 * N(y) (=Widerstand, Trägheit)