Das Motorrad als System [Inhalt]
Ueber Motorräder kann ich unter verschiedenen Perspektiven sprechen. Ich beobachte hier das Motorrad als System.
Die systemtheoretische Perspektive
|
Im Zentrum meiner Systemtheorie steht die Vorstellung, das ich mittels Systemen Phänomene erkläre. Typischerweise frage ich also, wie ein bestimmtes Phänomen zustande kommen kann. Ich frage mich beispielsweise, warum es in meiner Wohnung im Winter immer zwanzig Grad warm ist. Die Erklärung besteht dann beispielsweise in einer Beschreibung einer thermostatengeregelten Heizung, obwohl natürlich beliebige andere Erklärungen auch möglich sind und offen bleibt, welche Erklärung im konkreten Fall sozusagen die richtige wäre. Systemtheoretisch beschreibe ich Mechanismen, mit welchem ich die zu erklärenden Phänome erzeugen kann. Mit der thermostatengeregelten Heizung gelingt es mir die Temperatur konstant zu halten.
Mir geht es nicht darum, wozu (solche und andere) Erklärungen gut sind, sondern nur um die Erklärungen als solche, die einer bestimmten Art des Nach(her)denken entspringen. Hier will ich über das Motorradfahren nachdenken, wobei mir auch gleichgültig ist, wozu Motorradfahren gut sein könnte. Einen hier explizierten Zweck erfüllt das Motorradfahren dadurch, das ich darüber nachdenken kann. Als Phänomen verwende ich meine Er-Fahrungen, die ich mit Motorräder mache.
Phänomen(e) und Erklärungen
|

|

|
Ich kann mit dem Motorrad fahren, ich kann draufsitzen und fahrend einen Weg mit Kurven zurücklegen, beispwielsweise eine Rennstrecke umrunden. Natürlich muss ich darüber nicht staunen. Ich kann einfach zur Kenntnis nehmen, dass ich Motorradfahren kann. Es geht ja, es ist also der Fall. Ich muss auch nicht darüber staunen, dass ich Kurven fahren kann. Ein guter Ignorant staunt nie. Ganz viele Motorradfahrer staunen nicht darüber, dass sie Kurven fahren können. Und ganz viele wissen gar nicht, was sie dabei tun. Sie können es einfach. Aber sie können und wollen auch gar nicht darüber sprechen, was sie dabei tun. Ich - wie natürlich auch viele andere Motorradfahrer - staune manchmal eben doch. Worüber? Nun, das ergibt sich erst durch die Erklärungen, die ich mir dann konstruiere, weil ich erst im Nachhinein weiss, was ich erklärt habe und mithin, worüber genau ich gestaunt habe.
In meiner systemtheoretischen Perspektive geht es um Mechanismen oder Konstruktionen. Ich schaue hergestellte Motorräder an, nicht die Physik, es geht also nicht um Kräfte. Als Erklärungen sehe ich ausschliesslich Mechanismen, Kräfte fungieren nur in der Beschreibung der phänomenalen Erfahrung. Dass ein Motorrad fährt oder fällt, gehört zu meinen Erfahrungen, wenn ich darüber Rede, rede ich von Kräften wie etwa der Schwerkraft oder von der Kraft des Motores, die ich mit der Kraft von Pferden vergleiche. Dass mein Motorrad nur bis zur Strasse und nicht etwa zum Erdmittelpunkt - dem Ende der Schwerkraft - fällt, bezeichne ich durch eine Gegenkraft, die die Strasse auf mein Motorrad ausübt. Ich verwende solche Kräfte, um auszudrücken, was mein Motorad macht, nicht um irgendetwas zu erklären. Mittels Kräften kann ich das Verhalten des Motorrades sehr gut darstellen; in diesem Sinne sind Kräfte ein rhetorisches Mittel.
Mittels Kräften kann ich etwa sagen, dass mein Motorrad auf der Strasse stehen kann, genau dann, wenn die relevanten Kräfte im Gleichgewicht sind. Ich denke aber vom stehenden Motorrad aus, das meiner Erfahrung entspricht, und setze dann Kräfte ein.
Stehen auf zwei Rädern
|
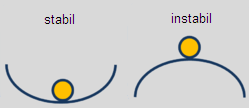
Zunächst staune ich darüber, dass ich mit einem Gefährt, das nur zwei Räder hat, nicht unbedingt umfalle, gerade weil das Umfallen auch einer Erfahrung entspricht. Ein Motorrad ist wie das Ei des Kolumbus: es muss aufrecht gehalten werden - und meine Erfahrung ist, dass das möglich ist. Ich bediene mich derselben Vorstellungen wie Kolumbus, der das Problem hatte, dass die Erdkugel sich eigenwillig verhält - etwa schwebt und nicht etwa auf die Sonne fällt. Ich führe erklärenderweise "Kräfte" ein. Ich erkläre so, als ob "Kräfte" existierten. G. Bateson bezeichnete "Kräfte" wie etwa die Gravitation als Erklärungsprinzipien, weil sie für Erklärungen erfunden werden.
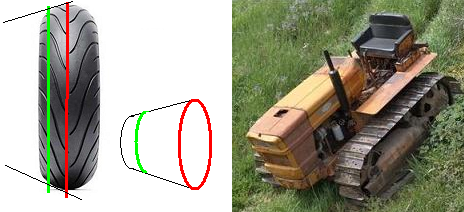
Ich vermute, dass ich mit einem "Motorrad" mit zwei hinreichend breiten Autoräder ohne weiteres still stehen, aber dafür nicht ohne weiteres (oder eher fast gar nicht oder nur gerade aus) fahren könnte. Mein Problem ergibt sich wohl dadurch, dass Motorradräder eine gewölbte Aufstandsfläche haben und so einen instablilen Zustand produzieren. Die Motorradreifen bilden eine Kante, auf welcher das Motorrad nur steht, wenn dessen Schwerpunkt genau über dieser Kante liegt.
|
|
|
|
Ich staune also (allerdings nicht so sehr) darüber, dass ich auf zwei Motorrad-Rädern, also sozusagen auf zwei punktförmigen Auflagen, "stehen" kann, wobei Stehen - also im Stillstand - ziemlich viel schwieriger ist als im Fahren. Das Motorrad ist in einem sehr labilen Zustand, wenn es steht, während es fahrend, relativ stabil ist, respektive mit viel weniger bewusstem Aufwand am Umfallen gehindert werden kann. Wenn ich mit mein Motorrad vor dem Rotlicht stehe, versuche ich jeweils die Füsse auf den Fussrasten zu lassen. Das ist schwierig, ich mache dann allerhand Bewegungen mit meinem Körper und mit der Lenkstange, um das Motorrad in der Balance zu halten. Wenn ich dann wieder anfahre, "steht" das Motorrad wieder wie von selbst. Ich beobachte zuerst das Motorrad im Stillstand.
Ich stehe normalerweise auf zwei Füssen, warum soll ich also nicht auch auf zwei Rädern stehen können? Meine Füsse sind - davon abgesehen, dass eher wie Autoreifen als wie Motorradreifen aufliegen - recht komplizierte Auflageflächen. Ich kann aber sogar auf einem Sprungstab (Pogo Stick) stehen, bei welchem ich auf einem einzigen Punkt stehe. Ich kann das - wenn ich es kann - ausbalancieren. Und das kann ich natürlich auch mit dem Einrad und mit dem Motorrad, während es auf dem Drei- oder Vierrad - wenigstens im Stillstand - nichts zu balancieren gibt.
Beim Balancieren halte ich den Schwerpunkt über der Radstandlinie, indem ich mich und das Motorrad hin- und herbewege, und so laufend etwas nachkorrigiere, wenn der Schwerpunkt aus der Senkrechten geht. Da ich jeweils etwas zu viel oder etwas zu wenig ausgleiche, entsteht sofort wieder ein neues Ungleichgewicht, welches ich wieder ausgleichen muss. Das statische Gleichgewicht, also das senkrechte Hinstellen, ist für mich kaum erreichbar (obwohl das natürlich bei der nötigen Ruhe und dem Fehlen von äusseren Störungen wie Wind im Prinzip auch möglich wäre). Das Motorrad gerade hinzustellen ist wie das Aufstellen eines Ei's.
Die Konstruktion
|
|

|
|
Ich denke also darüber nach, was ich genau mache, wenn ich auf dem Motorrad das Gleichgewicht halte. Und dazu schaue ich zunächst auch mein Motorrad genauer an.
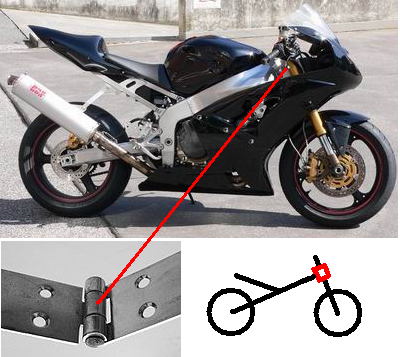
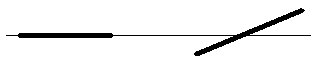
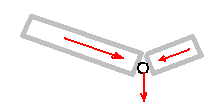
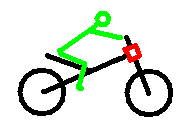
Das Motorrad sehe ich als zwei über ein Scharnier verbundene Radaufhängungen. Das Scharnier nenne ich Lenkkopf. Die Scharnierhülse ist Teil des Rahmens, der Scharnierstift gehört zur Gabel, für die folgenden Ueberlegungen könnte das auch umgekehrt sein. In beiden Teilen ist das jeweilige Rad gefedert, aber in der Richtung fixiert. Man kann zunächst sagen, dass die Räder durch ein Scharnier verbunden sind.
Die Handlungsfolgen der Konstruktion
Im Stillstand kann ich das Vorderrad hin und her drehen und so das Balancieren unterstützen. Wenn ich das Vorderrad nach links drehe, kann ich ein Kippen nach links verhindern. Wenn ich dann in der Folge nach rechts kippe, fange ich dieses Ungleichgewicht mit einer Lenkerdrehung nach rechts. Durch das Lenken bewege ich das ganze Motorrarad, also auch das hintere Rad, und auch meinen Körper, so dass sich der Schwerpunkt laufend über der Standlinie, durch die beiden Radauflagepunkte, hin und her bewegt.
|
|
|
|
Ein wichtiger Punkt der Konstruktion besteht im sogenannten Nachlauf, der dadurch zustande kommt, dass die Gabel nicht senkrecht steht. Bei sogenannten easyrider-Choppern kann man erkennen, wie sich Nachlauf und Radabstand auswirkten. Je größer der Nachlauf ist, um so mehr verändert sich die Radstandlinie, wenn der Lenker gedreht wird. Je größer der Radstand, desto weniger verschiebt sich der Schwerpunkt beim Lenken. Beim Balancieren drehe ich den Lenker jeweils in die Richtung, in die ich zu fallen drohe, so dass der Schwerpunkt wieder über die Radstandlinie kommt.

|
|
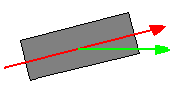
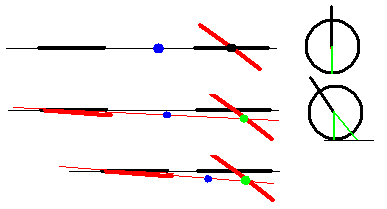 blau= Schwerpunkt
blau= Schwerpunkt
grün = Radnabe senkrecht über den Standpunkt
|
senkrechtes Scharnier
angewinkeltes Scharnier
Nachlauf-Abhängigkeit
Radstand-Abhängigkeit
|
|
Man kann - wie bereits gesagt - auch eine Konstruktion in der Balance halten, die kein Scharnier hat, was beispielsweise bei Rädern auf dem Hochseil zu sehen ist. Es ist nur etwas (oder viel) schwieriger. Der Fahrer balanciert das Gesamtsystem "Motorrad mit Fahrer", welches er durch seine Korrekturen in eine sogenannten Fliessgleichgewicht (staedy state) hält. Aber das Motorrad neigt durch seine Konstruktion auch dazu, in diese Balance zu gehen. Wenn ich ein Fahrrad am Sattel schiebe, schlägt das Vorderrad ein, sobald ich das Fahrrad zur Seite geneige, es scheint sich aufgrund seiner Konstruktion gegen das Umfallen zu wehren. Dieses "Eigenlenkverhalten" haben auch Motorräder.
Geschwindigkeit
|
|

|
Das Motorrad ändert seinen Charakter ganz grundlegend, wenn eine bestimmte Geschwindigkeit erreicht wird. Die kritische Geschwindigkeit liegt in Abhängigkeit der Motorradkonstruktion bei ungefähr dreisig Kilometer pro Stunde. Unterhalb dieser Geschwindigkeit ist das Motorrad ohne spürbare dynamische Trägheit, energetisch gesprochen ist die Bewegungsenergie zu klein. Das Motorrad unterliegt fast nur der Schwerkraft.
Wenn das Motorrad aber eine bestimmte minimale Geschwindigkeit erreicht, zeigt sich die gespeicherte Bewegungsenergie als Trägheit. Spürbar wird diese Trägheit einerseits für das Motorrad als Ganzes, da es geradeaus fahren will, und andererseits bekommen die Räder eine Stabilität durch ihre Rotation, was sich darin zeigt, dass sich das Vorderrad schlecht auslenken lässt. Ich verwende die beiden Kräfte zur Beschreibung des von mir erlebten Verhaltens des Motorrades, dass eben darin besteht, dass ich im Stehen umkippe, während ich im Fahren praktisch nichts tun muss, um auf den Rädern zu bleiben. Der Uebergang von einem zum anderen Verhalten erscheint fliessend, aber von vielem abhängig.
Natürlich interessiert mich vor allem was bei höherer Geschwindigkeit passiert, für Geschwindigkeiten unterhalb 30 km/h brauche ich kein Motorrad. Ich kann aber besser verstehen, wie das Motorradfahren funktioniert, wenn ich diesen Uebergang bewusst wahrnehme.
Das langsame Geradeaus
|
Wenn ich hinreichend langsam geradeaus fahre, balanciere ich mit dem Motorrad ähnlich wie im Stillstand, indem ich das Gleichgewicht, das abwechselnd zuweit links und zuweit rechts ist, kompensiere. Das mache ich durch Gewichtsverlagerung und durch Lenkbewegungen. Mit den Lenkbewegungen bringe ich jeweils den Schwerpunkt des Motorrades wegen dem Nachlauf wieder über die Standlinie. Die Lenkbewegung führt aber auch dazu, dass ich Kurven fahre. Das Geradeaus ist also eine Schlängelbewegung aus sehr kleinen Kurven, was ich beim langsamen Fahren noch gut sehen kann und beim allmählich schnelleren Fahren immer weniger wahrnehme.
Ich kann also mit dem Motorrad - wenn ich mit hinreichender Auflösung hinschaue - in langsamer Fahrt nur Kurven fahren. Das Geradeausfahren ist eine Kombination von abwechslungsweisem Kurvenfahren, wobei die Kurven durch das Ausbalancieren mit dem Lenker entstehen.
|
|
|
Die langsame Kurve
|
Die Wölbung der Reifen führt zur Instabilität des Motorrades im Stillstand, sie hat aber auch eine Auswirkung, die sich beim Fahren zeigt. Wenn das Motorrad in eine Schräglage kommt, ist die Auflage der Reifen kegelförmig. Der Umfang des Reifens ist in der Mitte grösser als auf den Seiten. Das bewirkt, dass der Reifen an verschiedenen Stellen verschiedene Geschwindigkeiten hat, weil die Drehzahl für den ganzen Reifen gleich ist. Wenn ich einen Kegel auf einer Fläche abrolle, macht der Kegel eine Kurve. Bei Raupenfahrzeugen benutze ich diese Differenz zum Steuern. Ich bremse die kurveninnere Raupe, so dass die kurvenäussere Raupe schneller fährt, wodurch das Fahrzeug eine Kurve fährt. Bei vierräderigen Fahrzeugen wie Autos muss dieser Unterschied auf der Antriebsachse durch ein Differential ausgeglichen werden. Die kurvenäusseren Räder eines Autos fahren einen viel weiteren Weg als die kurveninneren.
Wenn ich ein ausgebautes Motorrad-Rad rollen lasse, kippt es rasch auf eine Seite und macht dann eine Kurve, bevor es ganz umfällt. Wenn ich ein Fahrrad am Sattel festhalte und in eine Schräglage bringe, dreht sich das Vorderrad aufgrund des Nachlaufes auch im Stillstand nach innen, was aber ein ganz anderer Effekt ist.
|
|
|
Die schnelle Kurve
|
Wenn das Motorrad eine Kurve mit einer hinreichenden Geschwindigkeit fährt, wirkt umgänglich gesprochen eine Zentrifugalkraft, die das Motorrad nach aussen zieht. Es handelt sich um die Trägheit, die das Motorrad geradeaus bewegt, während die Schräglage das Motorrad in die Kurve zwingt. Die Zentrifugalkraft wirkt zusammen mit der Schwerkraft in einer resultierenden Kraft, durch welche das Motorad nach aussen und nach unten gezogen wird. Die Tragfähigkeit der Strasse und Reibhaftung zwischen Reifen und Boden verhindern, dass das Motorrad sich in der Richtung der resultierenden Kraft bewegt. Wenn das Motorrad genau auf dieser Kraftlinie liegt, neutralisieren sich die beiden Kräfte so, dass die resultierende Kaft am Pneu der Haftreibung entgegensteht, also in Hitze und Verschleiss verwandelt wird, während der Fahrer sich im Gleichgewicht empfindet.
Das Motorrad ist in einer dynamisch stabilen Lage, wenn es genau in der Schräglage der resultierenden Kraft fährt. Vorläufig und ungenau gesprochen stehen die Räder in der Kurve genau so wie auf der Geraden, das heisst es gibt keine Auslenkung. Das Vorderrad zeigt also im Prinzip weder in die Kurve noch aus der Kurve. Die Kurve erscheint aber nur als homogene Kurvenlinie, wenn ich mit kleiner Auflösung hinschaue. Bei hinreichender Auflösung sehe ich dieselbe Schlangenlinie, die ich auch bei der vermeintlichen Gerade sehe. Ich bin laufend am Korrigieren, weil meine Schräglage immer zu gross oder zu klein ist.
Die Kurve ist also eine Folge der Reifenwölbung, nicht der Lenkerstellung. Ich brauche den Lenker in der Kurve genau gleich wie auf der Geraden, zum Balancieren. Allerdings hat der Lenker schon eine Steuer-Funktion - wenn auch eine etwas komplizierte.
|
|

|
Lenken
Wenn ich unterhalb der kritischen Geschwindigkeit bin, etwa wenn ich das Motorrad auf dem Parkplatz schiebe, drehe ich den Lenker und mithin das Vorderrad in die Richtung, in welche das Motorrad fahren soll. Das Motorrad bleibt dabei in einem instabilen Zustand, das heisst, ich halte es aufrecht, wozu meine Füsse am Boden sind. Wenn ich im Schritttempo fahre, lenke ich die Fahrtrichtung auch indem ich das Rad in die gewünschte Richtung drehe. Ich balanciere dabei das Motorrad ziemlich aufrecht, weil es andernfalls hinfallen würde. Die Kurve, die das Motorrad fährt, ergibt sich dadurch, dass das Vorderrad in eine bestimmte Richtung rollt, und das Hinterrad quasi nachgeschleift wird (Schräglaufwinkel).
Das in die Kurve lenken verschiebt den Schwerpunkt des Motorrades in die Kurve. Als Fahrer muss ich unterhalb der kritischen Geschwinigkeit aus der Kurve lehnen, damit das Motorrad aufrecht bleibt. Ich kompensiere so die Zentrifugalkraft, die beim schnelleren Fahren an Einfluss gewinnt, wobei sich dann aber sehr vieles ändert.
|
Wenn ich die kritische Geschwindigkeit überschritten habe, entsteht nämlich ein spezieller Effekt dadurch, dass die beiden Teilsysteme, die durch das Scharnier verbunden sind, je eigene Trägheiten entwickeln. Der hinter Teil des Motorrades fährt in seiner Trägheit gerade aus, egal, was ich mit dem vorderen Teil des Motorrades, also mit der Lenkstange mache. Es gibt dazu einige kritische Phänomene, die ich später erläutern werde (zb Kickback, das Ausbrechen und das Abheben des Hinterrades, usw).
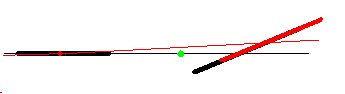
Wenn das Motorrad beispielsweise mit 60 km/h rollt, und ich den Lenker nach links bewege, stelle ich den Vorderradreifen schräg zur Fahrtrichtung des Motorrads, das durch seine Trägheit gerade aus fährt. Der Vorderradreifen wird dann wie ein Radiergummi mehr oder weniger quer zu seiner Radstellung vorwärts geschoben. Dabei entsteht eine Reibungskraft, die der Fahrtrichtung entgegenwirkt, das Motorrad also bremst, und andrerseits dazuführt, dass das Vorderrad, das von hinten geschoben wird, in die Richtung ausweicht, in die das Rad zeigt.
Da der Hintere Teil des Motorrades immer noch gerade ausfährt, verschiebt sich der Schwerpunkt des Motorrades auf die rechte Seite der Standlinie, wodurch das Motorrad nach rechts kippt und dann durch die Schräglage eine Rechtskurve fährt.
|
|
 |
Dadurch, dass die beiden Systemteile je eigene Kurven fahren, also beide Räder verschiedenen Schräglaufwinkeln unterliegen, entsteht eine Spannung im System, die dieses stabilisiert. Dieser Effekt wird durch unterschiedlicher Vorder- und Hinterreifen verstärkt, da die verschiedenen Wölbungen verschiedene Kurven ergeben würden. Ansatzweise wird das Motorrad, das sich ja von vielen anderen zweiräderigen Gefährten dadurch unterscheidet, dass die Räder hintereinander und nicht neben einander sind, in der Kurve zu einem zweispurigen Fahrzeug.
|
Das Phänomen des Lenkens
Das Phänomen besteht darin, dass ich um eine Rechtskurve zu fahren, nach links lenken muss. Durch die Trägheit der Teilsysteme kippt das Motorrad dabei nach rechts und durch die Wölbung der Reifen fährt das Motorrad dann nach rechts.
Ich höre oft, dass man nach links lenken müsse, damit das Motorrad nach rechts geneigt werden könne, und dass das Motorrad nach rechts geneigt werden muss, damit man eine Rechtskurve fahren könne. In dieser Formulierung wird das Phänomen sozusagen durch das Phänomen erklärt.
Wissen über das Lenken
Ganz oder auch gar nicht erstaunlich ist, dass ganz viele Motorradfahrer nicht wissen, dass sie um eine Linkskurve zu fahren nach rechts lenken. Wenn ich das erzähle, höre ich immer wieder allerlei Einwände. Wenn ich die Frage stelle, was mit dem Lenker gemacht wird, werden viele durch die komische Frage hellhörig und erzählen, dass sie Kurven durch Gewichtsverlagerungen einleiten würden. Wenn ich aber statt zu fragen, vorschlage, mit mir zusammen die Bewegung mit einer vorgestellten Lenkstange zu machen, drehen sehr viele Motorradfahrer, die bereits jahrelang Motorrad fahren, die Lenkstange auf die falsche Seite. Man muss eben nicht wissen, was man auf dem Motorrad macht, um erfolgreich Motorrad zu fahren. Der Körper stellt ein "automatisiertes", einverleibtes Können zur Verfügung, das sich beim ersten Rad- oder Motorradfahren selbstorganisiert ohne ins Bewusstsein zu gelangen. Ich merke einfach wie es geht und mache es dann so, dass es geht, ohne dass mir bewusst wird, was ich mache.
|
|

|
Das Wissen, was ich mit dem Lenker wirklich mache, brauche ich nicht und es hilft mir auch nicht - jedenfalls nicht beim Motorradfahren. In Fahrkursen hilft das Wissen dazu, die Motorradfahrer aufzuschrecken, also dazu, ihnen bewusst zu machen, dass man auch über Motorradfahren nachdenken kann. Das dient aber eher der Legitimation des Kurses, der ja weitgehend sprachlich ist, als dem Motorradfahren.
Auch ganz oder gar nicht erstaunlich ist, dass ganz viele Motorradfahrer zwar wissen, dass sie um nach links zu fahren, nach rechts lenken, weil sie es im Fahrkurs eben gehört haben, dass sie aber keine Ahnung haben, warum das so ist, weil das im Fahrkurs selten erläutert wird. Viele Motorradfahrer haben einfach die lustige, weil der Intuition widersprechende Geschichte vom Lenken schon einmal gehört und wissen nun, die Geschichte wahr ist - und dass dieses Wissen nicht viel nützt. Sie habe also keine Veranlassung darüber weiternachzudenken. Ginge es mir um das Motorradfahren, würde ich auch nicht darüber nachdenken. Mir geht es hier aber um das Nachdenken und dafür dient mir die Geschichte gut.
Die permanente Kompensation
Die systemtheoretische Perspektive focusiert Verhältnisse, die als Ausdruck eine konstanten Kompensation gedacht werden. Der gesunde Menschenverstand beobachtet und erklärt eher Veränderungen. Die Systemtheorie erklärt sozusagen, warum sich etwas nicht verändert. Die meisten Motorradfahrer erklären, warum sie hingefallen sind, sie erklären aber nicht, warum sie nicht unentwegt hinfallen. Der gesunde Menschenverstand befasst sich mit Krankheiten und Umfällen, also mit den Ausnahmen.
In meiner systemtheoretischen Perspektive erkläre ich, wie etwas funktioniert, nicht warum etwas nicht funktioniert. (Es gibt Leute, die sich auch als Systemtheoretiker bezeichnen, aber nur erklären können oder wollen, warum etwas nicht funktioniert. Sie haben einfach eine ganz andere Systemtheorie als ich. Es gibt eben viele Systemtheorien.)
Wenn ich durch meine Systemtheorie schaue, sehe ich Feedbackschleifen, die kompensierende Massnahmen auslösen.
Das schnelle Geradeaus
Wenn ich hinreichend schnell geradeaus fahre, drehen sich die Räder entsprechend schnell. Sie sind deshalb auslenkungsträg. Es treten aber doch Störungen auf, die das Motorrad aus dem Gleichgewicht bringen. Wenn sich dann das Motorrad auf eine Seite neigt, schlägt die Lenkung wegen dem Nachlauf in die entsprechende Richtung ein und das Motorrad beginnt eine kaum merkliche Kurve. Bei Kurvenfahrt wirkt die sogenannte Zentrifugalkraft, die das Motorrad aus der Schräglage aufrichtet. Daraufhin übersteigt die Fliehkraft die im Schwerpunkt angreifende Schwerkraft. Schräglage und Lenkeinschlagwinkel verringern sich, bis sie bei stabiler Schwerpunktlage ganz auf Null zurückgehen - die Geradeausfahrt ist wieder sichergestellt. Da beim Fahren ständig störende Einflüsse wirken, kommt es zu einem dauernden Auspendeln um die Schwerpunkt-Senkrechte. Das Motorrad fährt quasi von sich aus, das heisst durch seine Konstruktion, eine Schlangenlinie.
Beim Motorradrennen kann man gelegentlich beobachten, wie ein Motorrad alleine weiterfährt, nachdem es den Fahrer abgeworfen hat. Die Trägheit des ganzen Maschine ist dann eine Zeitlang gross genug, dass die kleinen Störungen des Gleichgewichts in Form einer kaum sichtbaren Schlangenlinie kompensiert werden. Aus den gleichen Grund kann ich auch freihändig Motorrad fahren.
Nochmals die Kurve
|
Auch die schnell gefahrene Kurve ist wie die Geradeausfahrt eine Schlangenlinie. Bei Supermoto-Motorrädern kann man die Auslenkungen sehr schön beobachten, weil diese Motorräder bewusst so gefahren werden. Man kann gut sehen, dass das Rad am Anfang in die "falsche" Richtung, also aus der Kurve, zeigt, um dann in eine Pendelbewegung zu kommen, in welcher das Rad dann auch in die Kurve hinein zeigt.
Wenn das Rad nach aussen zeigt, vergrössert sich die Schräglage, wenn es in die Kurve hinein zeigt, wird das Motorrad wieder aufgestellt, die Schräglage verringert sich. In einer gegebene Kurve und bei einer gegebenen Geschwindigkeit ist eine ganz bestimmte Schräglage nötig. Die gefahrene Schräglage ist aber immer etwas zu gross oder etwas zu klein und muss deshalb laufend korrigiert werden, wodurch eben auch in der Kurve eine kaum wahrnehmbare Schlangenlinie gefahren wird.
Abstrakt oder ideal würde das Motorrad genau die Kurve fahren, die seiner Schräglage entspricht. Aber wenn ich das Motorrad in diese Schräglage bringe, überschiesse ich zwangsläufig etwas, so dass ich fortlaufen meine Korrekturen korrigieren muss. Natürlich könnte ich mit der Zeit einpendeln, wobei meine Korrekturen immer kleiner würden, bis sie schliesslich ganz entfallen. Aber weder die Strasse noch die Reifen und die Federung sind so homogen, dass nicht sofort neue Störungen auftreten, und die Korrekturen wieder nötig machen.
Einen Punkt will ich noch speziell hervorheben. Bei den modernen Motorrädern sind der Vorder- und der Hinterreifen meistens ziemlich verschieden. Der hintere Reifen ist breiter und hat auch eine andere Kontur. Das kommt daher, dass die Reifen nicht nur für das Kurvenfahren zuständig sind, sondern auch noch etliche andere Funktionen übernehmen.
|
|

|
Die Reifen sind deswegen gar nicht für die abstrakt-ideale Kurvenfahrt konstruiert. Vielmehr wissen die Reifenhersteller - mindestens implizit - dass sich die Reifen immer im Schlupf befinden und einem wechselnden Schräglauf unterliegen. Die Reifen sind deshalb auch gar nicht so ausgelegt, dass ihre Wölbungen bei gegebener Schräglage (und gerader Lenkerstellung) dieselbe Kurve fahren. Die Kurve wird vom gesamten Motorrad gefahren, die Reifen machen individuelle Einflüsse geltend, die im System aufgehoben sind.
Kurvenfahren durch Gewichtsverlagerung
Die Vorstellung, dass man ein Motorrad durch Gewichtsverlagerung lenken könne, wird oft geäussert von Motorradfahrern, die sich den Lenkimpuls auf die falsche Seite nicht vorstellen können. Dazu gibt es aber eine einfache Uebung. Ich kann versuchen, ob ich durch Gewichtsverlagerungen beim freihändigen Fahren eine Kurve fahren kann. Meine Erfahrung ist: Ja, ich kann es, aber nur sehr beschränkt. Ich kann nicht richtig steuern, aber wenn ich genügend Platz und Zeit habe, kann ich das Motorrad durch Gewichtsverlagerungen in eine weite Kurve bringen. Ich nutze dabei die Eigenschaft der Nachlaufkonstruktion, die Kurven von sich aus auspendelt. Sie ermöglicht mir freihändig relativ starke Gewichtsverlagerungen zu machen, weil ich nicht befürchten muss, dass das Motorrad plötzlich in eine zu starke Kurve fällt. Das Motorrad will ja immer wieder in die Gerade zurück.
Zwischenbilanz
Das Motorrad fährt nur Kurven. Geradeaus ist eine Folge von vielen kleinen Kurven. Die Kurven kommen durch die Wölbung der Reifen zustande.
Das Motorrad besteht aus zwei Teilen, die durch ein Scharnier verbunden sind. Die beiden Teile des Motorrades haben ein Eigenleben, das in einem Zusammenleben aufgehoben ist. Dass ein Fahrzeug Kurven fahren kann, ist nicht von dieser Konstruktion abhängig, aber wie das Motorrad Kurven fährt, ist durch diese Konstruktion bestimmt. Den Ausdruck "Kurve" habe ich bisher für eine Differenz verwendet: Als Motorradfahrer will ich Kurven fahren, weil die Strasse Kurven hat. Ich fahre aber auch Kurven, wenn ich gar keine Kurven fahren will, weil das Motorrad gar nicht anderes zulässt. Es sind aber zwei verschiedene Kurven: die eine mache ich mit dem Motorrad und die andere macht das Motorrad mit mir. Die Kurve, die ich fahre, ist eine Funktion des Motorrades, die Kurve, die das Motorrad fährt, gehört zur Funktionsweise des Motorrades.
Die Funktionsweise des Motorrades bestimmt nicht nur das Kurvenfahren. Ich beobachte im folgenden noch ein paar weitere Aspekte, die an das "Scharnier" gebunden sind.
Drei Reibungen
Mit dem Motorrad habe ich neben dem Kurvenfahren noch zwei andere Reibungen: das Bremsen und das Beschleunigen. In allen drei Fällen ist die Reibung zwischen Reifen und Strasse kritisch. Diese Reibungen überlagern, wenn ich in der Kurve bremse oder beschleunige. Die Ueberlagerung wird im Kamm'schen Kreis dargestellt.
Ich beobachte also, wie sich diese Reibungen im System auswirken. Natürlich mache ich mir die technologische Entwicklung als Explikation zu nutze, es geht hier ja in geweisser Hinsicht darum, was ich als Motorradfahrer noch selbst mache, weil die Technik noch nicht so weit ist. Ich beginne mit der einfachsten Form, also mit der technisch am weitesten entwickelten - mit dem Bremsen.
Bremsen
|
Ich kann beide Räder - bei den meisten Motorrädern immer noch, aber nicht mehr lange - unabhängig von einander bremsen. Dabei bremse ich die Rotation der Räder, die zur Geschwindigkeit des Motorrades passt. Die Räder haben also zwei Geschwindigkeiten: sie haben eine Drehzahl und sie bewegen sich mit der Geschwindigkeit des Motorrades vorwärts.
Diese zwei Geschwindigkeiten sind im Vorderrad durch das Radlager flexibel gekoppelt. Wenn ich bei höherer Geschwindigkeit das Rad durch Bremsen blockiere, wird das sich nicht mehr drehende Rad auf der Strasse rutschend geschoben. Das heisst die eine Geschwindigkeit ist dann Null, während die andere Geschwindigkeit jene des Motorrades ist.
Wenn ich die Vorderradbremse benutze, bremst das Rad das vordere Teilssystem des Motorrades, während das hintere Teilsystem weiterhin schiebt. Dabei entsteht im Lenkkopf-Scharnier eine Kraft, die aus den unterschiedlichen Geschwindigkeiten resultiert.
Wenn die Trägheit des hinteren Motorradteil gerade auf die Gabel drückt, wird das Vorderrad geschoben, genau wie wenn das Motorrad durch den Motor beschleunigt wird. Dieser Kraft wird durch die Reibung zwischen Reifen und Strasse Wiederstand entgegengesetzt, die Bremse wirkt nur auf die Rotation des Rades. Aus Erfahrung weiss ich, dass die Haftung des rollenden Rades grösser ist als jene des blockierten. Aber egal, ob das Rad blockiert oder nicht, solange das Motorrad schiebt, bewegt es sich mit dem Motorrad zusammen vorwärts ...
... es sei denn, das Rad bewege sich nicht mehr vorwärts. Dann wird das Motorrad angehoben, was wegen dem Radlager möglich ist. Das Motorrad kann sich um das stillstehende Rad drehen.
Wenn das Scharnier nicht gerade steht, wird das Motorrad im Scharnier einknicken, und zwar unabhängig davon, ob das hintere Rad am Boden oder in der Luft ist. Ich erlebe dieses Einknicken als Ausscheren des hinteren Rades, weil ich das vordere Rad mit dem Lenker in der Richtung behalte.
Natürlich steht das Scharnier - wie das Ei des Kolumbus - nie gerade, aber es befindet sich oft im Fliessgleichgewicht des Geradeausfahrens. Es geht beim Bremsen also nicht vor allem darum geradeauszufahren, sondern darum die beiden Teilsysteme in einer "geraden" Balance zu halten. Das ist dasselbe Spiel wie das Geradeausfahren. Wenn das Scharnier knickt, fällt das Motorrad in eine Schräglage.
Beim Geradeausfahren pendelt das Motorrad von sich aus ein, es stabilisiert sich selbt - wenn es nicht vom Fahrer gestört wird. Beim Bremsen besteht die Schwierigkeit, dass ich als Fahrer die Lenkstange nicht nur festhalte, weil ich den Bremshebel ziehe, sondern ich halte den Lenker auch fest, weil ich mich selbst am Lenker festhalte. Der Fahrer ist ein drittes Teilsystem, das die beiden durch ein Scharnier verbundene Teilsysteme verbindet, und so auf die Bewegungen des Scharniers Einfluss nimmt. Ein Bild dafür ist ein Türschliesser, also ein Feder, die eine geöffnete Türe schliesst.
Als Fahrer bewege ich mich mit derselben Geschwindigkeit wie das Motorrad. Wenn das Vorderrad gebremst wird, schiebt nicht nur das Hinterrad auf das Scharnier, sondern ich als Fahrer schiebe über den Lenker auch das Vorderrad. Das ich dabei ein Drehmoment um die Rad achs erzeuge, beobacht ich später. Zunächst geht es mir um das Lenken, also um Drehmoment, die othogonal zur Vorderadachse stehen und die Scharnierstellung betreffen.
Wenn das Hinterrad seitlich ausbricht, verschiebt sich der Schwerpunkt auf dieselbe Seite wie das Hinterrad. Die Situation ist invers zu jener des Lenkens bei einer höheren Geschwindigkeit, entspricht also jener des Lenkens im Stillstand, obwohl man mit höherer Geschwindigkeit fährt. In beiden Fällen wird das Scharnier aus der Geraden gedreht und der Schwerpunkt verschoben. Beim Lenkimpuls bestimmt das Hinterrad durch Trägheit wohin die Reise des Schwerpunktes geht, beim Ausbrechen das Hinterrades bestimmt das Hinterrad die Richtung des Schwerpunktes, in dem es seine Trägheitsrichtung verlässt.
|
|


|
Wenn das Hinterrad ausbricht, muss ich den Schwerpunkt durch Balancieren wieder unter den Radstand kriegen, ich muss also Gegensteuer geben. Wenn ich beim starken Bremsen keine Kurve fahren will, sondern einfach möglichst schnell und ohne umzufallen anhalten will, ist die Situation wie im Stillstand, auch wenn die Dynamk eine ganz andere ist. Wenn das Hinterrad auf der linken Seite nach vorne kommt, geht der Schwerpunkt nach links. Ich drohe also nach links zu fallen und muss deshalb nach links steuern. Subjektiv erlebe ich dabei, dass das Vorderrad nach rechts gedreht wird. Das ist eigentlich auch der Fall, weil ich mich als Fahrer durch die Bewegung des Hinerrades nach rechts drehe und dabei den Lenker im Prinzip mitdrehe. Aus der Perspektive des Vorderrades, das auf seinem geraden Weg fährt, ist das Ausbrechen des Hinterrades gleichzeitig ein Gegensteuern, weil das Scharnier auf die Seite dreht. Das Motorrad macht also auch hier durch seine Konstruktion etwas sinnvolles.
Driften
|
Als Driften bezeichne ich eine Fahrtechnik, bei welcher der Fahrer sein Motorrad bewusst zum Übersteuern bringt. Dabei zeigt das Vorderrad natürlich zur Kurvenaußenseite, während das hintere Rad einen quasi negativen Schräglaufwinkel hat. Der Witz dieses Manövers liegt darin, dass das Fahrzeug einerseits am Kurvenausgang früher in die neue Fahrtrichtung zeigt und deshalb besser beschleunigt werden kann (Kammscher Kreis), und andererseits darin, dass das Bremsen weiter in die Kurve hinein verlegt wird.
Im Motorradsport gibt es eigentliche Driftdisziplinen wie Speedway, wo praktisch nichts anderes gemacht wird. Im Rennen der Supermoto erscheint das Driften als Fahrstil. Im Jahr 2000 hat G. Mc Coy das extreme Driften auch in die Strassenmotorradweltmeisterschaft gebracht, nachdem vorher alle Fahrer dirttrack-Trainings bei K. Roberts absolviert hatten. Michline produzierte eigens driftige Pneus auf kleineren Felgen (16,5"). Die elektronische Aufrüstung mit Antischlupf hat das Driften aber wieder unsichtbarer gemacht. Neuerdings (seit 2009, Stoner oder Rossi) wird im MotoGP die Beinstellung der Supermoto-Drifter verwendet, was die Drifts wieder besser erkennen lässt.
Das Andriften einer Kurve kann als „Bremsslide“ aufgefasst werden. Dabei lenkt der Fahrer etwas zu stark in die Kurve ein und bremst (nur) vorne, während das entlastete Hinterrad mit Gas auf Schlupf gehalten wird, so das es relativ gleichmässig und nicht abrupt ausbricht. Das Hinterrad kann auch durch leichtes Bremsen in Gleit- statt Rollreibung gebracht werden (das wir oft mit der Daumenbremse gemacht, die mehr Gefühl vermittels als die Fussbremse). Die Kupplung hilft schleifend, dass das Hinterrad nicht stempelt. Im Scheitelpunkt lenkt der Fahrer dann in die Kurve, was das Motorrad aufrichtet, während gleichzeitig durch teilweises Auskuppeln Haftung auf das Hinterrad gebracht wird. Sobald die Haftung einsetzt, kann der Fahrer praktisch mit Vollgas "aus der Kurve" fahren, weil er durch das Querstehen bereits die richtige Richtung hat, also gar nicht mehr in der Kurve fährt.
|
|

|
Beim Einlenken wird der kurveninnere Fuss beim Supermoto im Extremfall zur Entlastung des hinteren Rades auf den Boden gestellt. Dabei dient das Bein gleichzeitig als Balancegewicht und als potentielle Abstüzung einer zu grossen Schräglage, wenn plötzlich beide Räder driften. Das Driften funktioniert bei grossen Schräglagen am besten, deshalb sind breite Reifen vorteilhaft. Ich werde darauf zurückkommen.
In der MotoGP findet aber alles unter erheblich grösseren Geschwindigkeiten statt, und ist deshalb vergleichsweise nur in Ansätzen ausführbar. V. Rossi etwa zeigt die Supermoto-Methode wenn er beim Ausbremsen eines Gegners mit zu hoher Geschwindigkeit (oder neben der Ideallinie) auf eine Kurve zufährt. Das ausgestellte Bein dient dann als Balancefühler, aber immerhin es hat Sinn im heickelsten Moment des Rennens (aber nicht wie unser TV-Reporter immer wieder sagt, als Lockerungsübung). Die Entstehung dieser Methode ist bisher ungklärt, weil sie sich wohl einer Intuition verdankt, was allerdings etwas anderes ist, als das Ausrutschen auf der Fussraste. Für mich augenfällig ist die Verwandtschaft zum Supermoto. Und dort lassen sich eben Erklärungen finden, die das Steuern des Schwerpunktes betreffen.
Bei starken Motorrädern (wie in der MotoGP oder Superbike-Klasse) ist das Driften des Hinterrades auch bei Beschleunigen aus der Kurve ...
